CLion IDE 配置
我们推荐使用 CLion IDE 作为电控和视觉的开发 IDE,安装方式见官方教程 安装 CLion。
ROS 配置
参考 ROS setup tutorial 此外,为了兼容 catkin build 和 catkin_make 应作如下设置
- 打开 File | Settings | Build, Execution, Deployment | CMake
- 将 CMake options 的值更改为
-DCATKIN_DEVEL_PREFIX=../devel - 将 Build directory 的值更改为
../build
保存时自动格式化
开启 clang-format
打开 File | Settings | Editor | Code Style,在 ClangFormat 勾选 Enable ClangFormat(only for C/C++/Objective-C)
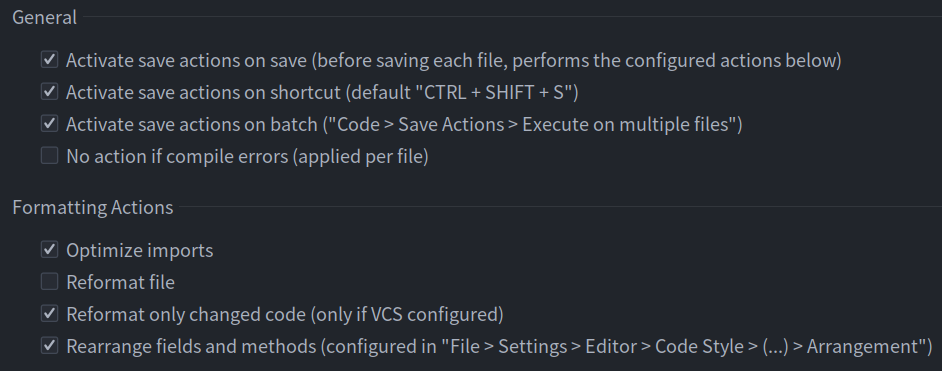
开启 Save Actions
- 打开 File | Settings | Plugins,在 Marketplace 中搜索并安装 Save Actions
- 重启 IDE,转到 File | Setttings | Save Actions,勾选以下选项:
代码同步
在调试时机器人时,有时为了快速修改参数和测试,不会通过 CI 进行构建和发布再安装到机器人上。我们会通过 scp 或 CLion 提供的代码同步,将需要调试的单个包传到机器人上的工作空间,在机器人上面编译和运行。
关于 Clion 的远程传输配置
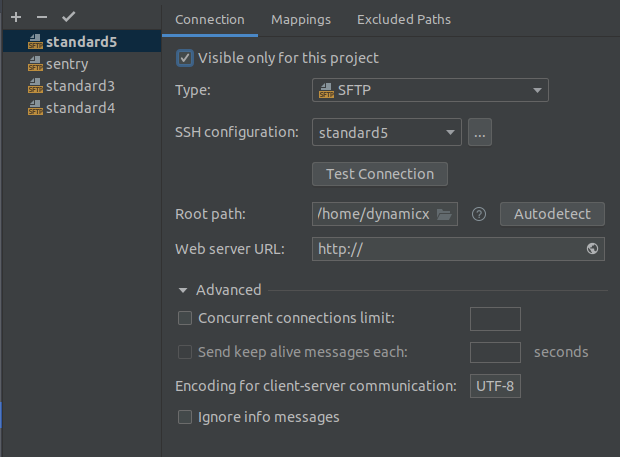
- 首先,在 deployment 处添加文件,文件类型选择 SFTP,并命名(命名取决于是什么机器人,比如 standard4 代表四号步兵。
- 点击 SSH configuration 处的省略号配置 ssh。
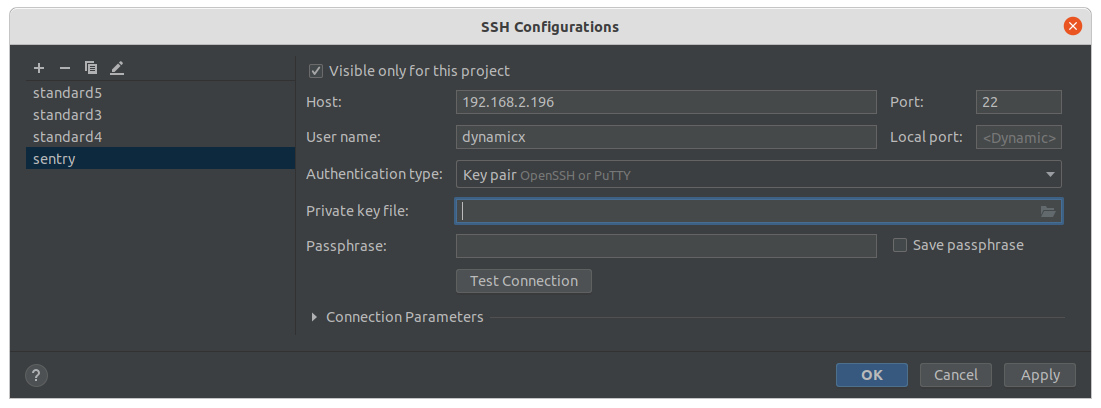
- 配置 Connection,配置好之后点击 Autodetect 去获取 ssh 账号下的根目录。
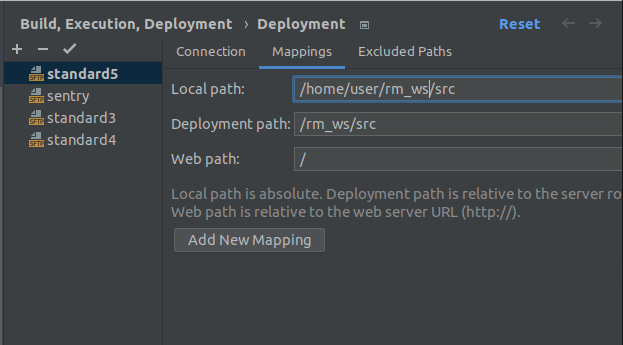
- 配置 Mapping。
远程传输流程
在 CLion 中的工作空间中,选择远程传输的功能包,鼠标点击右键,选择菜单栏中的 deployment ,upload to “目标主机”。
远程开发
在使用本地 IDE 在远程机器人上编译、运行开发和调试较为不常用,一般可参考Full remote mode。