Why rm-controls?
极高的代码复用率
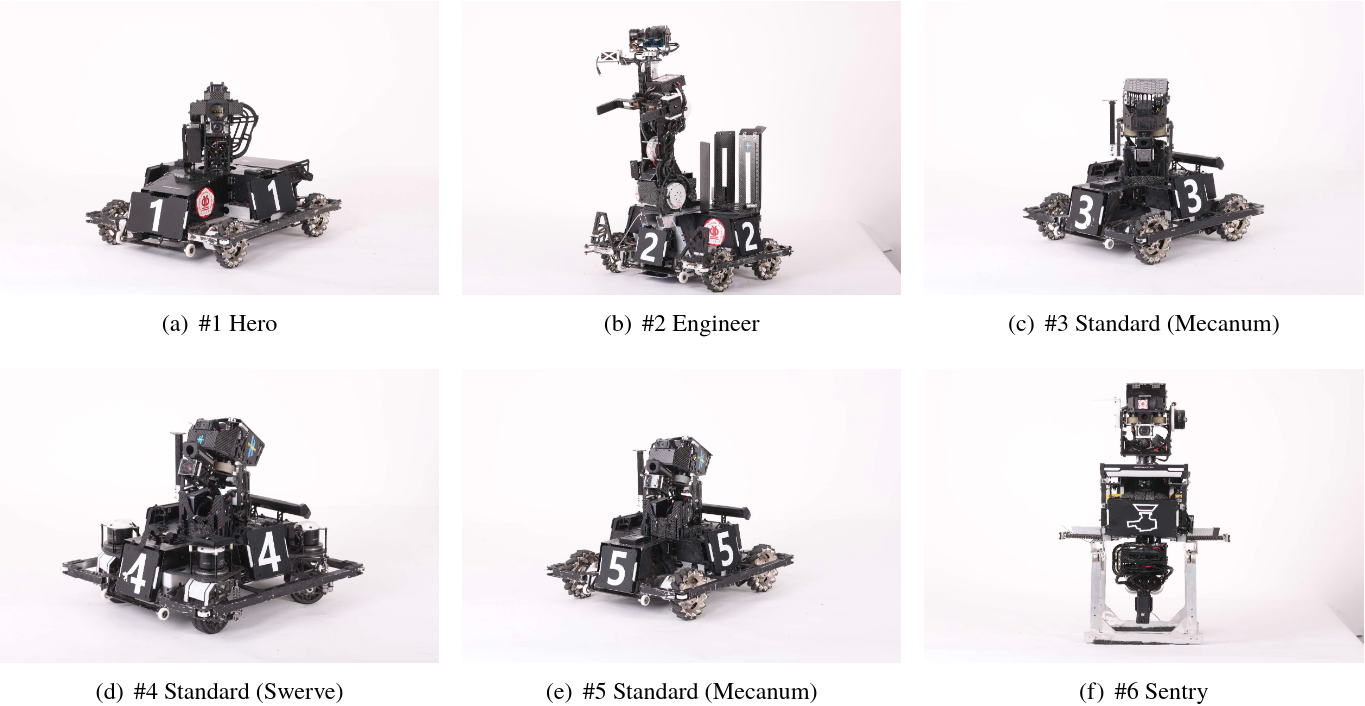
我们在设计代码架构时,极其注重代码复用性,将代码模块化并参数化,对于不同机器人只需要根据配置文件加载不同数量和种类的控制器。做到了一套代码给所有机器人同时使用,如:在开发好步兵的基础模块后,开发双云台哨兵时,只需要编写配置.yaml文件 ,除了决策层的开发,不需要书写或修改任何一行代码。下图展示部署使用了这套代码的机器人。
下面代码为哨兵的云台控制器部分配置文件,可以看到上下两个云台的配置文件结构相同,两个云台控制器被独立地动态地加载,然后分别获取两个控制器的参数,包括它要控制的关节名称,还有对外接口(以 ros topic 等形式)的名称。
upper_gimbal_controller:
type: rm_gimbal_controllers/Controller
detection_topic: "/upper_detection"
camera_topic: "/upper_camera/camera_info"
yaw:
joint: "upper_yaw_joint"
pid:
{
p: 5.0,
i: 0,
d: 0.3,
i_clamp_max: 0.0,
i_clamp_min: -0.0,
antiwindup: true,
}
pitch:
joint: "upper_pitch_joint"
pid:
{
p: 8.0,
i: 50,
d: 0.3,
i_clamp_max: 0.1,
i_clamp_min: -0.1,
antiwindup: true,
}
lower_gimbal_controller:
type: rm_gimbal_controllers/Controller
detection_topic: "/lower_detection"
camera_topic: "/lower_camera/camera_info"
yaw:
joint: "lower_yaw_joint"
pid:
{
p: 5.0,
i: 0,
d: 0.3,
i_clamp_max: 0.0,
i_clamp_min: -0.0,
antiwindup: true,
}
pitch:
joint: "lower_pitch_joint"
pid:
{
p: 5.0,
i: 100,
d: 0.2,
i_clamp_max: 0.4,
i_clamp_min: -0.4,
antiwindup: true,
}
多刚体动力学仿真
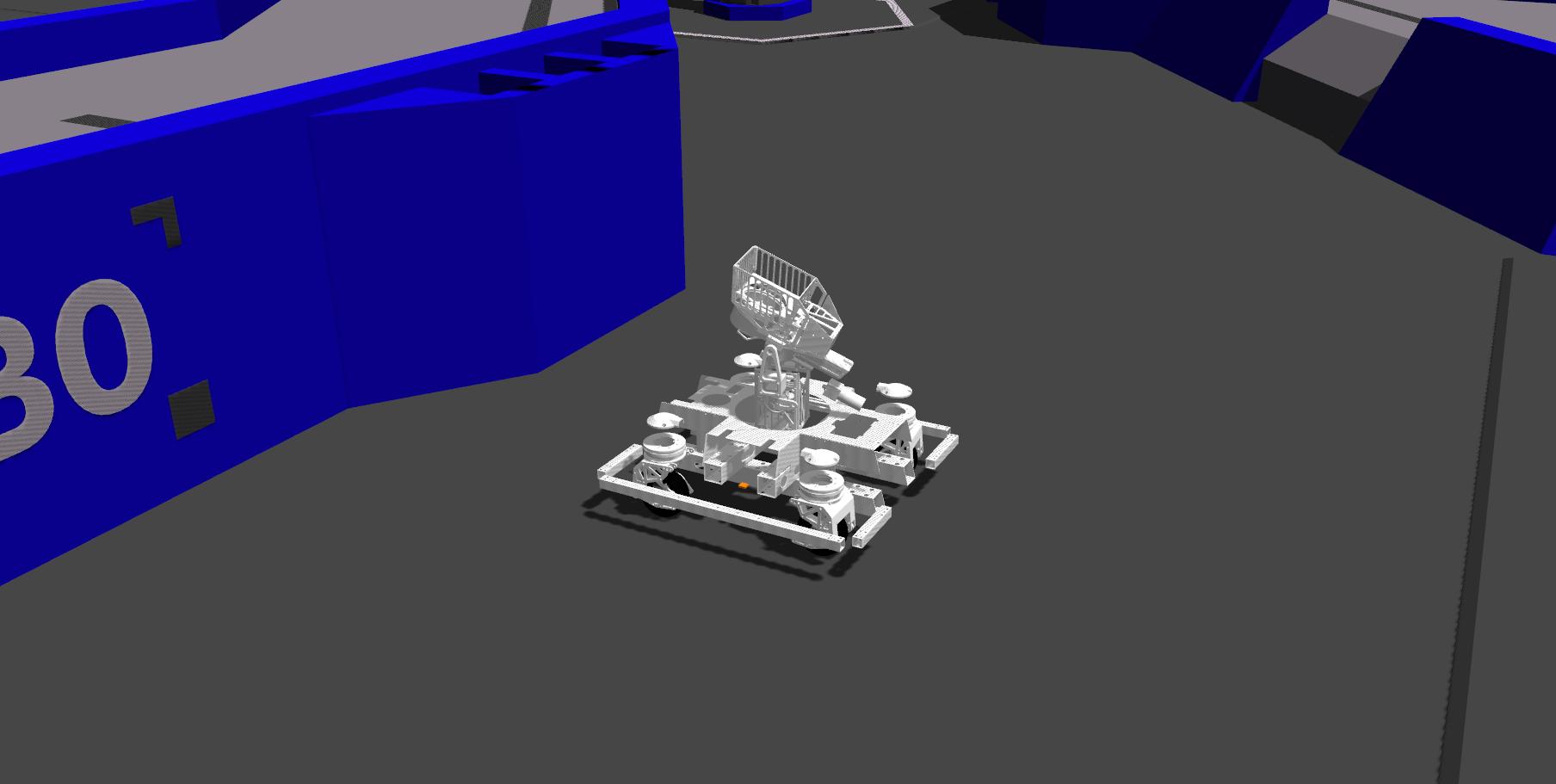
所有机器人都能在 Gazebo 进行多刚体动力学仿真,且仿真和实车运行的代码不需要相互移植,是同一份代码甚至同一个二进制文件。除了发射控制器,其他模块和控制器在开发时均会在仿真中调试和测试,打断点时可以做到时间暂停,在机械组还没有加工装配好车时已经可以把代码测试好,完成参数的粗调,大大提高开发和迭代效率。如:舵轮机器人在加工装配好后只花不到一天时间就测试调试完所有程序。下图为舵轮机器人在 RMUC 场地中的仿真。
持续集成
我们在自建 gitlab 服务器上使用了 industrial_ci 对代码进行持续集成,自动对代码进行编译、测试并发布到 apt 源上。

当在某台机器人上开发稳定之后,其他机器人可以使用安装或升级的方式获得最新功能的软件。如:使用两行指令完成底盘控制器的安装或更新。
sudo apt update
sudo apt install ros-noetic-rm-chassis-controllers
info
由于在 GitHub 上 开源,我们已经将大部分仓库转移至 GitHub 托管并使用 GitHub Actions 运行 CI。
良好的兼容性
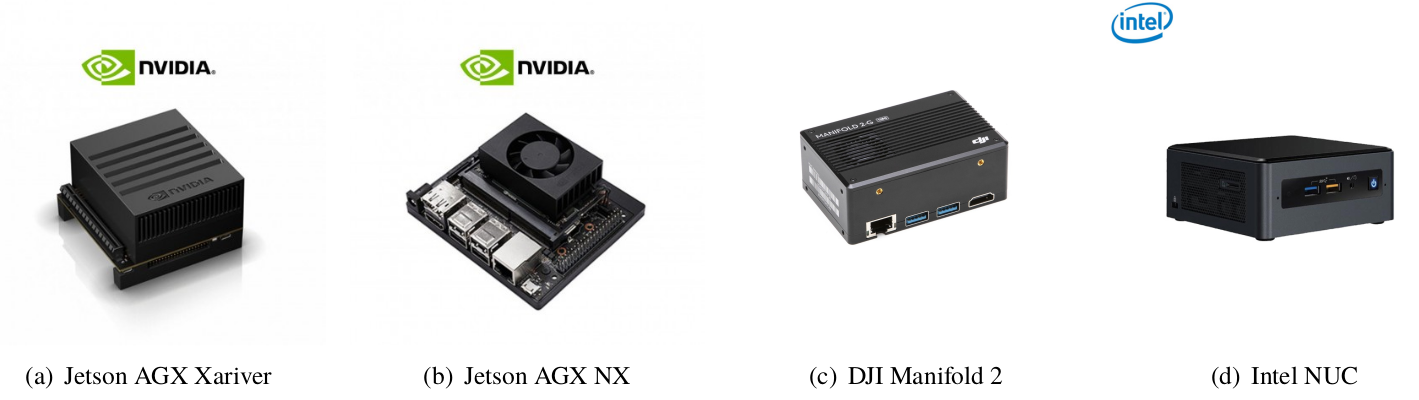
硬件接口使用了 Linux 的 SocketCAN 和 sysfs,意味着可以在 Jetson AGX 和妙算等带有 CAN 总线的 ARM 设备上运行,同时我们还制作了 usb 转 CAN 设备: rm_usb2can,从而支持在任意 x86 平台上面运行,如:Intel NUC 和队员的笔记本电脑,在 RMUC 中我们以 Intel NUC 为主,也被官方在 2021 年高中生暑期营中部署在妙算 2 上使用。下图展示了兼容的部分计算设备。
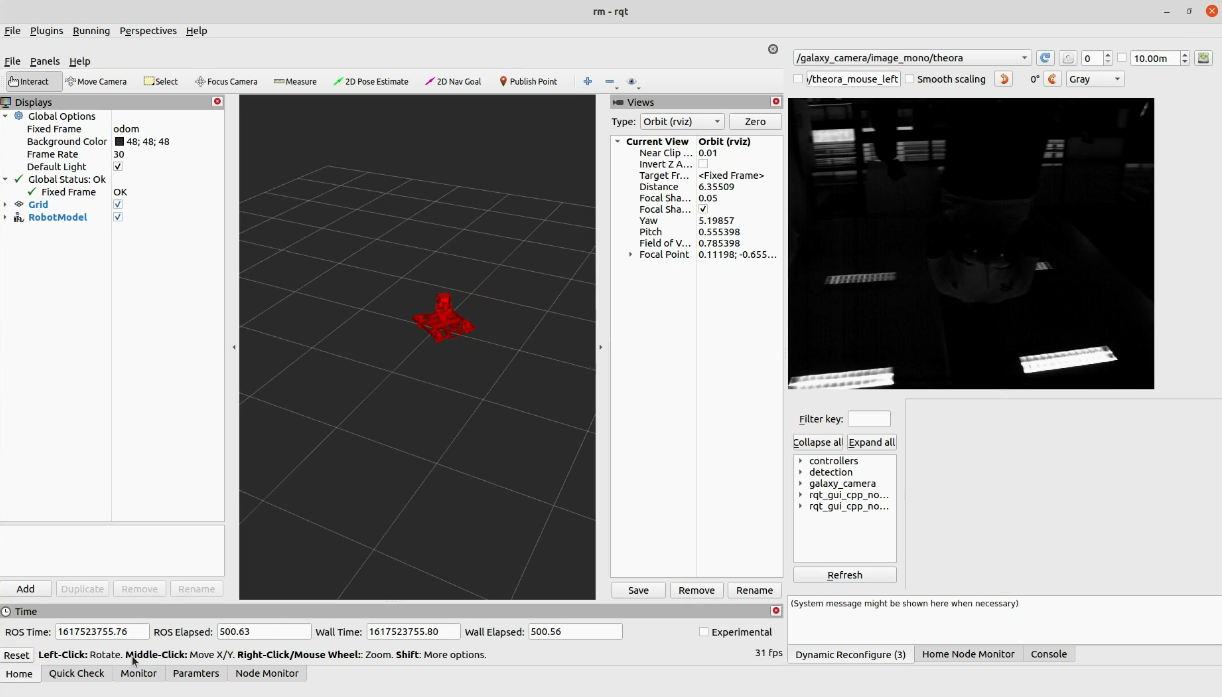
丰富的调试工具
依托 ROS 生态,可以使用多种可视化调试工具,对电机数据,计算结果和图像远程查看。还可以使用 dynamic_reconfigure 进行动态调参。展示了我们搭建的调试界面,由 rqt 的支持,我们不需要编写代码就可以构建自己的调试图形界面。