软件框架
rm-controls
tip
如果你不熟悉 ros-controls,请先阅读 prerequisite。
rm-controls 程序由多个 ROS package 构成,其中有元包: rm_control 提供了底层硬件和仿真的通用接口,元包 rm_controllers 则为各常用模块控制器,还有负责普通机器人操作的包 rm_manual 和哨兵决策包 rm_fsm。
- rm_control
- rm_msgs: 自定义的 ROS 话题消息、服务、动作
- rm_common: 常用函数、算法、裁判系统收发、ui
- rm_description: 所有机器人的 URDF,定义了:机器人各坐标系关系、电机与关节的映射、关节的限位、仿真需要的物理属性
- rm_hw: 同名节点通过 SocketCAN 与执行器进行通信获取数据并发送指令,在实车运行时提供硬件接口给控制器
- rm_gazebo: 同名 Gazebo Plugin 在仿真运行时提供硬件接口给控制器
- rm_dbus: dbus 遥控器驱动接收节点
- rm_controllers
- robot_state_controller: robot_state_publisher 的高性能版,高频维护 tf
- rm_chassis_controllers: 麦克纳姆轮、舵轮、平衡车的底盘控制器
- rm_gimbal_controllers: 有射击模型和跟踪滤波预测的云台控制器
- rm_shooter_controllers: 操作摩擦轮,拨弹盘完成发射控制器的控制器
- rm_calibration_controllers: 校准执行器位置的控制器
- rm_manual: 普通机器人决策
- rm_fsm: 哨兵机器人决策 未开源:
- rm_detection: 装甲板和风车视觉识别
- rm_stone: 矿石和障碍块视觉识别
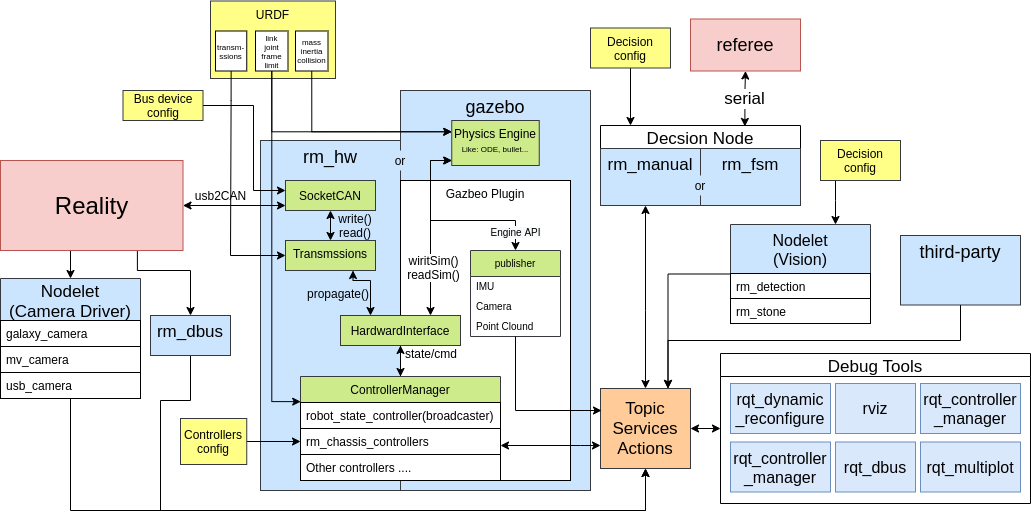
如上图,控制器从 HardwareInterface 获得各传感器和执行器的 handle,进行数据的更新和指令发送,同时通过 ROS 的话题、服务和动作接收其他节点的指令和发布自己的状态。相机驱动和视觉算法通过 nodelet 运行在同一个节点中并实现“零拷贝”。决策层通过串口读取裁判系统数据,并根据裁判系统数据和操作手指令通过话题、服务和动作对上述节点和第三方节点(如 move_base 路径规划、moveit 轨迹规划)进行操作。配置文件和数据由 rosparam 加载到 ROS 参数服务器上,各节点都能查询获取。多种调试工具也通过 ROS 的话题、服务和动作进行交互。
Prerequisite
下面阐述 ros-control 在实物中和 Gazebo 仿真中的相关机制。
ros-control 与真实硬件
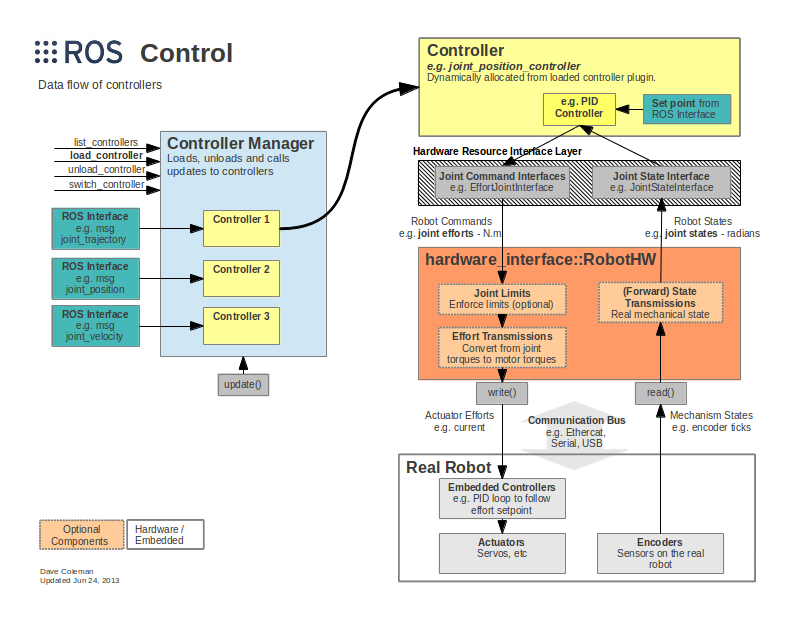
如下图,ros-control 提供这样的机制: 执行器(Actuator)的编码器等传感器数据被读取后通过 TransmissionsInterface 映射成关节 (Joint) 等机器人状态,将这些状态接口提供给控制器;经过控制器计算后得到关节指令经过限制,再映射为电机的指令,发送给电机。控制器管理器可以实时加载、开始和停止各种控制器(以动态库的形式编译)。
硬件接口
提供给控制器常见硬件接口
- Joint Command Interface - 关节指令发送接口
- Effort Joint Interface - 用于向指令是力矩/力的执行器 (如: RoboMaster 3508) 对应的关节发送指令
- Velocity Joint Interface - 用于向指令是速度执行器 (如: 部分舵机) 对应的关节
- Position Joint Interface - 用于向指令是位置执行器 (如: 大部分舵机) 对应的关节
- Joint State Interfaces - 关节状态获取接口,用于获取关节的位置、速度和作用力(力或扭矩)
- Actuator State Interfaces - 执行器状态获取接口,用于获取执行器的位置、速度和作用力(力或扭矩)
- Actuator Command Interfaces - 执行器指令发送接口,和关节指令接口类似
- Force-torque sensor Interface - 力-力矩传感器接口
- IMU sensor Interface - IMU 传感器接口
Transmissions
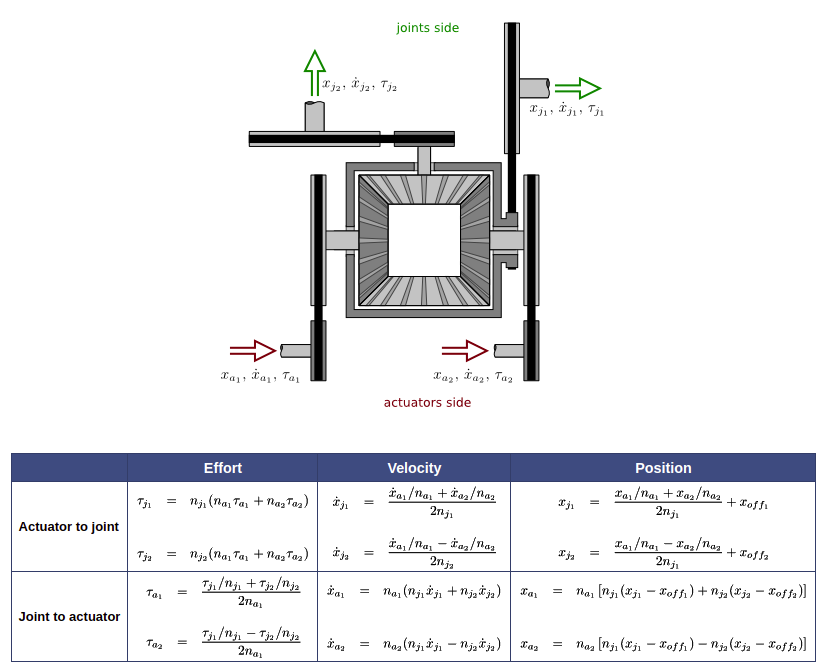
Transmissions 是实际机器人执行器于关节的状态和指令映射,有简单减速比(改变正负可以将电机反向)、差速器(常见于机械臂末端两个关节)、双执行器(两个电机带动一个关节)。下图展示了差分 Transmissions 的简图和计算方法。
下列代码为步兵机器人 URDF 中云台 pitch 轴执行器: pitch_joint_motor 与云台 pitch 关节 pitch_joint 的 simple_transmission ,由于 pitch 轴是 6020 电机直驱,减速比为 1.0,又实际电机转向于关节定义的转向相反,取减速比为 -1.0,在校准时实测得偏移为 1.559rad。有了这一个的映射,云台控制器只使用关节状态不需要考虑不同机器人电机安装位置、方向和初始值。
<transmission name="trans_pitch_joint">
<type>transmission_interface/SimpleTransmission</type>
<actuator name="pitch_joint_motor">
<mechanicalReduction>-1</mechanicalReduction>
</actuator>
<joint name="pitch_joint">
<offset>1.559</offset>
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
</transmission>
ros-control 与 Gazebo
得益于上述的机制,控制器可以被加载到硬件接口上,也可以被加载到 Gazebo 模拟器中, 如下图所示。值得一提的是实车硬件和仿真用的控制器都是同一份代码,不存在移植或重新编译的过程,甚至使用的是同一个二进制文件(由服务器 CI 编译测试并发布到 apt 源并安装)。
