硬件规格
CAN 总线
內置 CAN
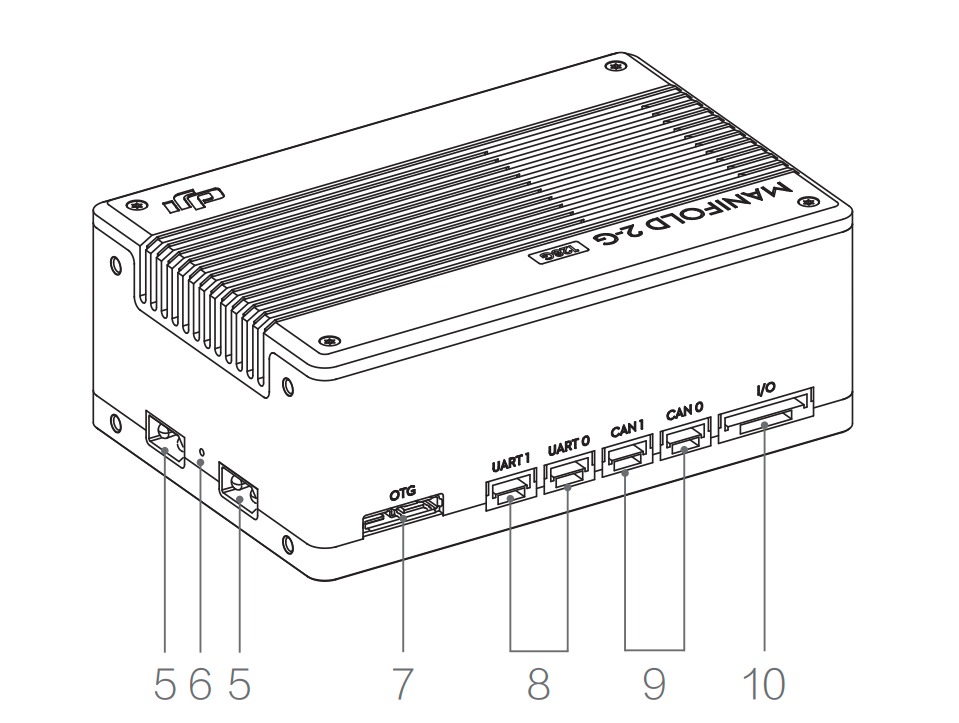
Jetson AGX Xavier/NX/TX2 和 妙算 2-G(TX2)都具有两个 build-in 的 CAN 总线接口。下图中 9 展示了 妙算 2 的内置 CAN 的物理接口位置。
下图展示了自制的 Jetson AGX Xavier 接线板。

上述的方式都可以很方便地通过 Linux 主线提供的 SocketCAN 机制使用 CAN 接口。
USB 转 CAN
我们还给 Intel NUC 和队员的调试电脑开发了 USB 转 CAN 模块 ,该模块的驱动已经被包含进 Linux 主线,仅需插上就可以通过 SocketCAN 访问 CAN。
下图展示了:使用 NUC 主板上的 USB 1.25mm 端子 稳定连接 USB 转 CAN 模块。

其他接口
GPIO、PWM、I2C 接口正在开发中,详见 road map。
模块拓扑
下图展示的是整车基本硬件拓扑框图(工程机器人整车拓扑的差异较大,在此不给出)。
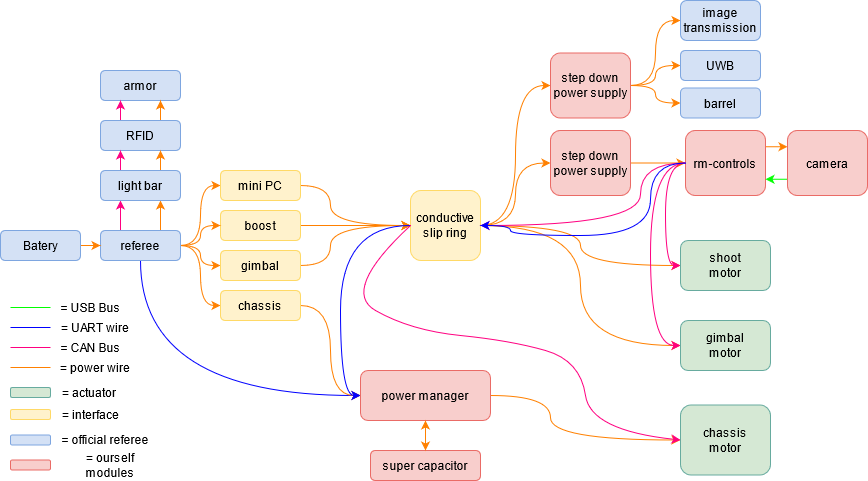
机器人基本硬件拓扑结构是以云台和底盘两大部分组成的,这两个部分以导电滑环为分割线隔开。车上的 12V、19V、5V、3.3V 电压组分别由 LM25116、LM3150、SY8303、RT9193 提供。