bullet_solver
Barrel angle solver
Overview
In practice, the target to be hit is often moving, and the bullet is subject to resistance in the air and delay in the barrel firing. We need to build a barrel angle solver to predict the firing angle of the barrel to achieve more accurate strikes.
Objective:
- Consider air resistance (proportional to velocity)
- Consider target velocity
- Consider firing delay
Difficulty.
- No resolution
- Target solving frequency greater than 1Khz
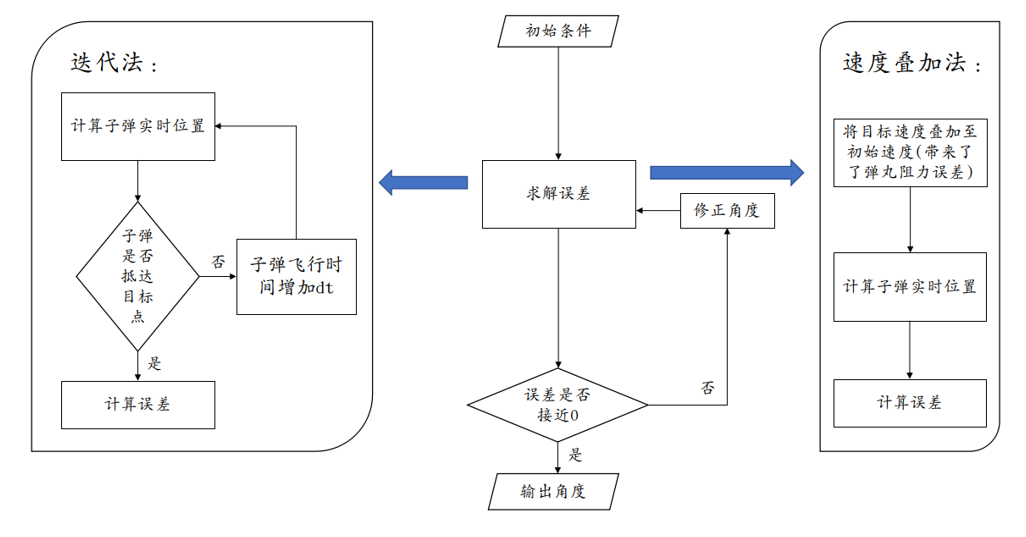
Two algorithms.
- Iterative method
- Advantages: high accuracy (when iterations are high)
- Disadvantage: slow speed
- Speed superposition method
- Advantages: fast (within 20 us)
- Disadvantage: inherent error exists
- Block diagram of the algorithm.
Model derivation
Air resistance is proportional to velocity, and the target point moves with constant velocity
2D bullet motion model: In the xz plane, the actual position of the bullet corresponds to a vector in the xoz plane, assuming that the bullet bullet launch point is the coordinate origin.
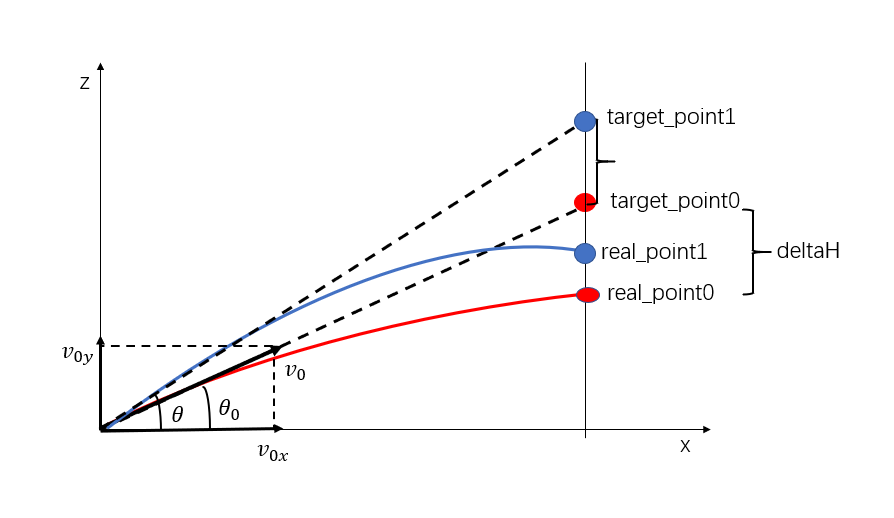 Denote by x the component of the bullet position vector in the x-axis direction, and by z the component of the bullet position vector in the z-axis direction; denotes the initial velocity of the bullet launch, denote the components of the bullet velocity in the x-axis and z-axis, denote the components of in the x-axis and z-axis, respectively, k is the air resistance coefficient, g is the acceleration of gravity, m denotes the weight of the bullet, $ denotes the component of the air resistance to the bullet in the x-direction, and according to the physical knowledge we know that
Denote by x the component of the bullet position vector in the x-axis direction, and by z the component of the bullet position vector in the z-axis direction; denotes the initial velocity of the bullet launch, denote the components of the bullet velocity in the x-axis and z-axis, denote the components of in the x-axis and z-axis, respectively, k is the air resistance coefficient, g is the acceleration of gravity, m denotes the weight of the bullet, $ denotes the component of the air resistance to the bullet in the x-direction, and according to the physical knowledge we know that
Organizing equation (1) yields.
Taking the moment when the bullet is fired as moment 0, the component of the initial velocity in the x direction is , and the above equation is integrated as follows
Solving from equation (2) yields.
Integrating both sides of the above equation yields.
Also, the resistance of the bullet in the z-axis direction can be found as
The differential equation is obtained by rectifying
The solution yields.
Target point motion model: let the starting position of the target point be , the velocity of the target point in the x-axis direction is and in the z-axis direction is , the component of the actual position of the target point in the x-axis direction is and in the z-axis direction is . Following the equation of uniform linear motion, it is obtained that
Based on the derivation of the above 2D model, with y denoting the component of the bullet position vector in the y-axis direction and denoting the component of in the y-axis; the component of the actual position of the target point in the y-axis direction is , the y-axis coordinate of the starting position is , and the velocity in the y-axis direction is , the motion model of the bullet and the target point in the y-direction under the 3D model can be obtained as follows
Code implementation
Base class
template<typename T>
class BulletSolver {
public:
BulletSolver(T resistance_coff, T g, T delay, T dt, T timeout) :
resistance_coff_(resistance_coff),
dt_(dt), g_(g), delay_(delay),
timeout_(timeout) {};
virtual ~BulletSolver() = default;
virtual void setTarget(const T *pos, const T *vel) = 0;
virtual void setBulletSpeed(T speed) { bullet_speed_ = speed; }
virtual void solve(const T *angle_init) = 0;
virtual void output(T *angle_solved) = 0;
protected:
T bullet_speed_{};
T resistance_coff_, g_, dt_, timeout_, delay_;
};
The BulletSolver class is the base class for all models and algorithms, defining the interface to the algorithm functions that implement the solution to the bullet launch angle, and the member variables such as air resistance coefficient, gravitational acceleration, launch delay, and bullet speed.
function functions
setTarget()
setTarget(), used to initialize the initial position and speed of the target.
setBulletSpeed()
Set the bullet speed, used to initialize the bullet launch speed.
solve()
compute, used to solve the final barrel angle
output()
output, used to output the final barrel angle
Variable Description
bulletspeed(
T)Initial velocity of the bullet
resistancecoff
Air resistance coefficient
g_
gravitational acceleration
dt_
Loop iteration timeout
timeout_
The condition to exit the loop, when the calculated time of the bullet in the air exceeds this value
delay_
Barrel firing delay
Bullet motion model
rt_bullet_rho = (1 / this->resistance_coff_) * bullet_v_rho
* (1 - std::exp(-this->fly_time_ * this->resistance_coff_));
rt_bullet_z = (1 / this->resistance_coff_)
* (bullet_v_z + this->g_ / this->resistance_coff_)
* (1 - std::exp(-this->fly_time_ * this->resistance_coff_))
- this->fly_time_ * this->g_ / this->resistance_coff_;
Variable Description
bullet_v_rho(
T)Superposition of bullet velocity and
rt_bullet_rho
Superposition of the actual position of the bullet in the x-axis component and in the y-axis component
rt_bullet_z
The actual position of the bullet in the z-axis component
flytime
The time of flight of the bullet
Target point motion model
rt_target_x += this->target_dx_ * this->dt_;
rt_target_y += this->target_dy_ * this->dt_;
Variable Description
rt_target_x(
T)The actual position of the target point in the x-axis component
rt_target_y
The actual position of the target point in the y-axis component
targetdx
target point velocity in x-axis component
targetdy
Target point velocity in y-axis component
Please refer to bullet_solver.cpp for the implementation of all algorithms
Test program
Include header files
## Include <iostream>
### Include "bullet_solver.h"
The header file contains the definitions of all classes and functions.
Create class object instances
int main(int argc, char **argv) {
Iter2DSolver<double> iter2d(0.1, 9.8, 0.01, 0.0001, 3.);
Approx2DSolver<double> approx2d(0.1, 9.8, 0.01, 0.01, 3.);
Iter3DSolver<double> iter3d(0.1, 9.8, 0.01, 0.0001, 3.);
Approx3DSolver<double> approx3d(0.1, 9.8, 0.01, 0.0001, 3.);
Variable Description
iter2d(
Iter2DSolver)Instance of the iterative algorithm class object for the 2D model
approx2d(
Approx2DSolver)An instance of the velocity superposition algorithm class object for the 2D model
iter3d(
Iter3DSolver)3D model of the iterative algorithm class object instance
approx3d(
Approx3DSolver)Velocity superposition algorithm class object instance for 3D models
Set parameters
Here is an example of the iterative algorithm for 3D models
double angle_init[2]{}, angle_solved[2]{};
double bullet_speed = 18..;
double pos_3d[3] = {7, 0, 1};
double vel_3d[3] = {0, 1, 0};
iter3d.setBulletSpeed(bullet_speed);
iter3d.setTarget(pos_3d, vel_3d);
Parameter description
angle_init(
double)Custom initial launch angle
angle_solved(
double)The calculated launch angle
bullet_speed(
double)The initial velocity of the bullet
pos_3d(
double[])Initial coordinates of the target point
vel_3d(
double[])velocity of the target point in the x, y, z directions
Calculate and output the launch angle
iter3d.solve(angle_init);
iter3d.output(angle_solved);
std::cout << "yaw:" << angle_solved[0] << " pitch:" << angle_solved[1] << std::endl;