枪管角解算器
概述
在实际中,要打击的目标往往是会移动的,并且子弹在空气中也会受到阻力以及枪管的发射会存在延时。我们需要做一个枪管角度解算器,用于预测枪管的发射角度,从而实现更加精准的打击。
目的:
- 考虑空气阻力(与速度成正比)
- 考虑目标速度
- 考虑发射延时
难点:
- 无解析
- 目标解算频率大于 1Khz
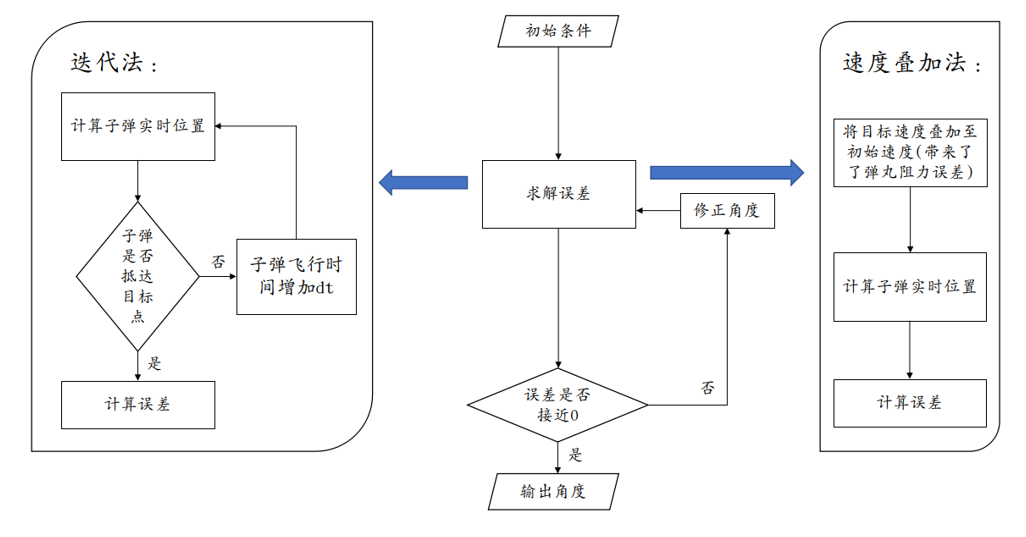
两种算法:
- 迭代法
- 优点:精度较高(迭代次数多时)
- 缺点:速度慢
- 速度叠加法
- 优点:速度快(20us 内)
- 缺点:存在固有误差
- 算法框图:
模型推导
空气阻力与速度成正比,目标点以恒定速度运动
2D 子弹运动模型:在 xz 平面内,假设以子弹子弹发射点为坐标原点,则子弹的实际位置相当于在 xoz 平面内的一个矢量。
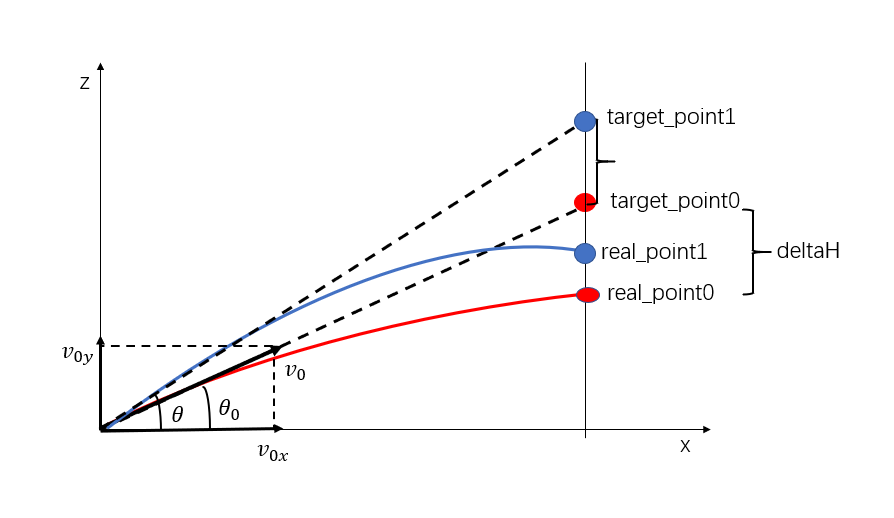 用 x 表示子弹位置矢量在 x 轴方向上的分量,用 z 表示子弹位置矢量在 z 轴方向上的分量;表示子弹发射初速度,分别表示子弹速度在 x 轴、z 轴的分量,分别表示在 x 轴、z 轴的分量,k 为空气阻力系数,g 为重力加速度,m 表示子弹重量,表示子弹所受空气阻力在 X 方向上的分量,根据物理知识知:
用 x 表示子弹位置矢量在 x 轴方向上的分量,用 z 表示子弹位置矢量在 z 轴方向上的分量;表示子弹发射初速度,分别表示子弹速度在 x 轴、z 轴的分量,分别表示在 x 轴、z 轴的分量,k 为空气阻力系数,g 为重力加速度,m 表示子弹重量,表示子弹所受空气阻力在 X 方向上的分量,根据物理知识知:
将(1)式整理得到:
以子弹发射的时刻为 0 时刻,发射初速度在 x 方向上的分量为,对上式积分:
由(2)式求解得到:
对上式两边积分可得:
同时,可求子弹在 z 轴方向上受到的阻力为:
整理得到微分方程:
解得:
目标点运动模型:设目标点的起始位置为,目标点在 x 轴方向上的速度为,在 z 轴方向上的速度为,目标点实际位置在 x 轴方向的分量为,在 z 轴方向的分量为。跟据匀速直线运动的公式可得:
基于上述 2D 模型的推导,用 y 表示子弹位置矢量在 y 轴方向上的分量,表示在 y 轴的分量;目标点实际位置在 y 轴方向的分量为,起始位置的 y 轴坐标为,在 y 轴方向上的速度为,可以得到 3D 模型下子弹和目标点在 y 方向的运动模型:
代码实现
基类
template<typename T>
class BulletSolver {
public:
BulletSolver(T resistance_coff, T g, T delay, T dt, T timeout) :
resistance_coff_(resistance_coff),
dt_(dt), g_(g), delay_(delay),
timeout_(timeout) {};
virtual ~BulletSolver() = default;
virtual void setTarget(const T *pos, const T *vel) = 0;
virtual void setBulletSpeed(T speed) { bullet_speed_ = speed; };
virtual void solve(const T *angle_init) = 0;
virtual void output(T *angle_solved) = 0;
protected:
T bullet_speed_{};
T resistance_coff_, g_, dt_, timeout_, delay_;
};
BulletSolver 类是所有模型以及算法的基类,定义了实现求解子弹发射角度的算法函数接口,和空气阻力系数、重力加速度、发射延时、子弹速度等成员变量。
函数功能
setTarget()
设置目标点,用于初始化目标点初始位置及速度
setBulletSpeed()
设置子弹速度,用于初始化子弹发射速度
solve()
计算,用于解算最终的枪管角度
output()
输出,用于输出最终枪管角度
变量说明
bulletspeed(
T)子弹初速度
resistancecoff
空气阻力系数
g_
重力加速度
dt_
循环迭代时间间隔
timeout_
退出循环的条件,当计算到子弹在空中飞行的时间超过此值时将退出循环
delay_
枪管发射延时
子弹运动模型
rt_bullet_rho = (1 / this->resistance_coff_) * bullet_v_rho
* (1 - std::exp(-this->fly_time_ * this->resistance_coff_));
rt_bullet_z = (1 / this->resistance_coff_)
* (bullet_v_z + this->g_ / this->resistance_coff_)
* (1 - std::exp(-this->fly_time_ * this->resistance_coff_))
- this->fly_time_ * this->g_ / this->resistance_coff_;
变量说明
bullet_v_rho(
T)子弹速度与的叠加
rt_bullet_rho
子弹实际位置在 x 轴分量和在 y 轴分量的叠加
rt_bullet_z
子弹实际位置在 z 轴分量
flytime
子弹的飞行时间
目标点运动模型
rt_target_x += this->target_dx_ * this->dt_;
rt_target_y += this->target_dy_ * this->dt_;
变量说明
rt_target_x(
T)目标点实际位置在 x 轴分量
rt_target_y
目标点实际位置在 y 轴分量
targetdx
目标点速度在 x 轴分量
targetdy
目标点速度在 y 轴分量
所有算法具体实现请参考bullet_solver.cpp
测试程序
包含头文件
#include <iostream>
#include "bullet_solver.h"
头文件中包含所有类、函数的定义。
创建类对象实例
int main(int argc, char **argv) {
Iter2DSolver<double> iter2d(0.1, 9.8, 0.01, 0.0001, 3.);
Approx2DSolver<double> approx2d(0.1, 9.8, 0.01, 0.01, 3.);
Iter3DSolver<double> iter3d(0.1, 9.8, 0.01, 0.0001, 3.);
Approx3DSolver<double> approx3d(0.1, 9.8, 0.01, 0.0001, 3.);
变量说明
iter2d(
Iter2DSolver)2D 模型的迭代算法类对象实例
approx2d(
Approx2DSolver)2D 模型的速度叠加算法类对象实例
iter3d(
Iter3DSolver)3D 模型的迭代算法类对象实例
approx3d(
Approx3DSolver)3D 模型的速度叠加算法类对象实例
设置参数
这里以 3D 模型的迭代算法为例
double angle_init[2]{}, angle_solved[2]{};
double bullet_speed = 18.;
double pos_3d[3] = {7, 0, 1};
double vel_3d[3] = {0, 1, 0};
iter3d.setBulletSpeed(bullet_speed);
iter3d.setTarget(pos_3d, vel_3d);
参数说明
angle_init(
double)自定义的初始发射角度
angle_solved(
double)计算得出的发射角度
bullet_speed(
double)子弹发射初速度
pos_3d(
double[])目标点初始坐标
vel_3d(
double[])目标点在 x、y、z 方向上的速度
计算并输出发射角
iter3d.solve(angle_init);
iter3d.output(angle_solved);
std::cout << "yaw:" << angle_solved[0] << " pitch:" << angle_solved[1] << std::endl;